测量放线“神器”——BIM放样机器人
摘要:全站仪,它利用其快速、精准、智能、操作简便、劳动力需求少的优势,将BIM模型中的数据直接转化为现场的精准点位。本期,小编主要就这种全站仪精确测量及放样技术原理给大家作简要介绍。
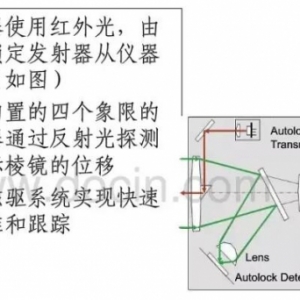
测量放线“神器”——BIM放样机器人下面这个全站仪,它利用其快速、精准、智能、操作简便、劳动力需求少的优势,将BIM模型中的数据直接转化为现场的精准点位。本期,小编主要就这种全站仪精确测量及放样技术原理给大家作简要介绍。 一、主要硬件包括: 1.全站仪主机:用于指示、测量放样点位的设备,其放大倍率:32倍;测角精度:2秒;测距精度:1mm;高速测距精度:2mm。 2.外业平板电脑:即手持终端,导入BIM模型后,用于控制、选择测量或放样点,可直观连接和设置全站仪。 3.三脚架:支撑及固定全站仪主机,可根据需要调整高度及角度。 4.全反射棱镜及棱镜杆:用于点位在地面上测量及放样,与主机智能连接后准确定位,实时动态跟踪。 二、主要软件包括: 1. Trimble Field Link软件:连接内业到外业(BIM到现场);可视化放样、采集现场数据、计算误差、输出工作报告、拍摄实时视频等。 2.基于REVIT及CAD的测量及放样点位插件:把点位在模型中选取并设置完成,导出到Trimble Field Link软件,操作软件可指挥机器人现场放样。 三、工作原理: 1)从BIM模型中设置现场控制点坐标和建筑物结构点坐标分量作为BIM模型复合对比依据,在BIM模型中创建放样控制点。 2)在已通过审批的机电BIM模型中,设置机电管线支吊架点位布置,并将所有的放样点导入Trimble Field Link软件中。 3)进入现场,使用BIM放样机器人对现场放样控制点进行数据采集,即刻定位放样机器人的现场坐标。 4)通过平板电脑选取BIM模型中所需放样点,指挥机器人发射红外激光自动照准现实点位,实现“所见点即所得”,从而将BIM模型精确的反应到施工现场。
|
 放样机器人"/>
放样机器人"/>












会员评论